Architecture Overview
AirPath is designed around three core principles: performance, flexibility, and loose coupling. This page explains how the major systems work together.
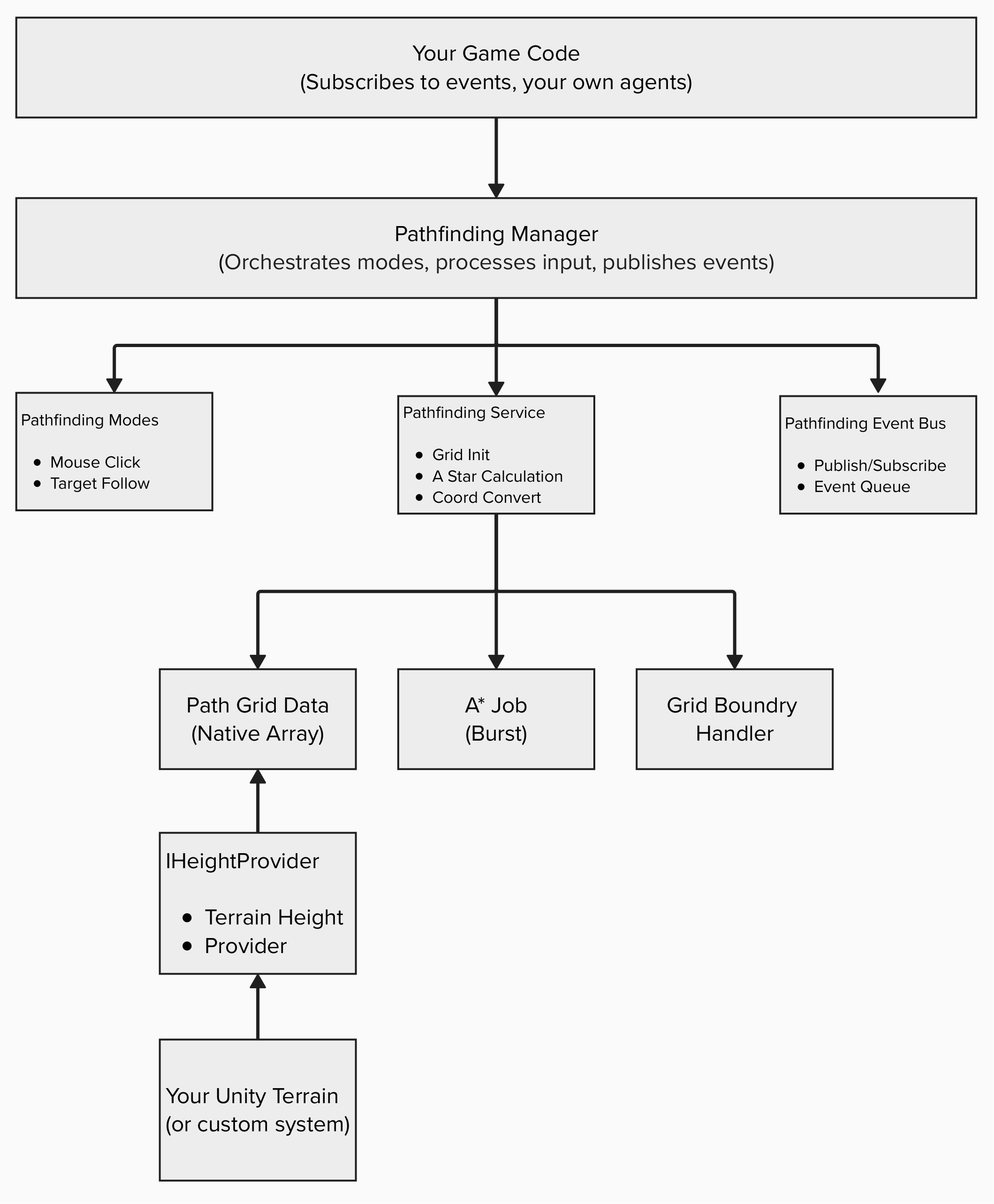
System Architecture
Data Flow
When you request a path, here's what happens:
1. Request
A pathfinding mode (MouseClick or TargetFollow) creates a PathRequest with start/end positions.
User clicks terrain → MouseClickMode → PathRequest created
2. Grid Conversion
World positions are converted to grid coordinates using GridBoundaryHandler. Out-of-bounds positions are clamped if configured.
World (150, 0, 200) → Grid (9, 12)
3. A* Calculation
The PathfindingService schedules a Burst-compiled A* job. The job runs on a worker thread using NativeArrays from PathGridData.
Start (9, 12) → A* Algorithm → Path [indices...]
4. Path Conversion
Grid indices are converted back to world positions with terrain height applied.
Grid path → World path with heights → List<Vector3>
5. Event Publication
Results are published via PathfindingEventBus. Any subscribed component receives the path.
PathCalculatedEvent → Your agent controller → Agent follows path
Key Components
PathfindingManager
The central orchestrator. It:
- Manages pathfinding modes (MouseClick, TargetFollow)
- Initializes the PathfindingService
- Handles mode switching
- Publishes events for path requests and results
You configure it in the Inspector and rarely interact with it from code.
PathfindingService
The core pathfinding engine. It:
- Maintains the pathfinding grid (NativeArrays)
- Executes Burst-compiled A* jobs
- Handles coordinate conversion
- Manages boundary clamping
For direct path calculation without modes, use this class.
IHeightProvider
An interface that abstracts terrain data. AirPath doesn't depend on Unity Terrain directly, it asks an IHeightProvider for height data.
Built-in: TerrainHeightProvider for Unity Terrain.
Custom: Implement IHeightProvider for procedural terrain, meshes, or voxels.
PathfindingEventBus
A ScriptableObject-based event system. Components communicate through events rather than direct references.
Key events:
PathRequestedEvent— Path calculation startedPathCalculatedEvent— Path calculation completePathfindingModeChangedEvent— Mode switched
Configuration System
All settings are stored in ScriptableObject assets:
| Asset | Purpose |
|---|---|
PathfindingConfiguration | Grid size, cost multipliers, boundary handling |
VisualizationConfiguration | Path line, cell colors, debug display |
PathfindingEventBus | Event system settings |
This allows hot-swapping configurations and keeping scenes clean.
Design Principles
Event-Driven Communication
Components don't hold direct references to each other. Instead, they:
- Publish events when something happens
- Subscribe to events they care about
This makes the system modular — you can remove visualization without breaking pathfinding.
Interface Abstraction
AirPath uses IHeightProvider instead of depending on Unity Terrain directly. This means:
- You can use any height source
- Testing is easier (mock height providers)
- The core algorithm is terrain-agnostic
DOTS for Performance
The A* algorithm is:
- Burst-compiled — Native code performance
- Job System — Runs on worker threads
- NativeArrays — No GC allocation during pathfinding
This keeps pathfinding off the main thread and avoids frame hitches.
ScriptableObject Configuration
Settings live in assets, not scenes. Benefits:
- Share configurations across scenes
- Swap presets at runtime
- Version control friendly
- No scene modifications for setting changes
Thread Safety
| Component | Thread | Notes |
|---|---|---|
| PathfindingManager | Main | Unity APIs require main thread |
| PathfindingService | Main | Schedules jobs, handles results |
| A* Job | Worker | Burst-compiled, no Unity API calls |
| Event Bus | Main | Events processed on main thread |
| Height Provider | Main | Called during initialization |
The A* calculation runs on a worker thread, but CalculatePath() blocks until complete. For truly async pathfinding, consider wrapping in a coroutine.
Next Steps
- Grid System — How the pathfinding grid works
- Pathfinding Algorithm — The A* implementation