Pathfinding Algorithm
AirPath uses a height-aware A* algorithm optimized for aerial navigation. This page explains how the algorithm works and how it calculates path costs.
A* Overview
A* is a best-first search algorithm that finds the shortest path between two points. It uses two values for each cell:
- G Cost — Actual cost to reach this cell from the start
- H Cost — Estimated cost to reach the end (heuristic)
- F Cost — Total cost (G + H)
The algorithm always explores the cell with the lowest F cost next, guaranteeing an optimal path.
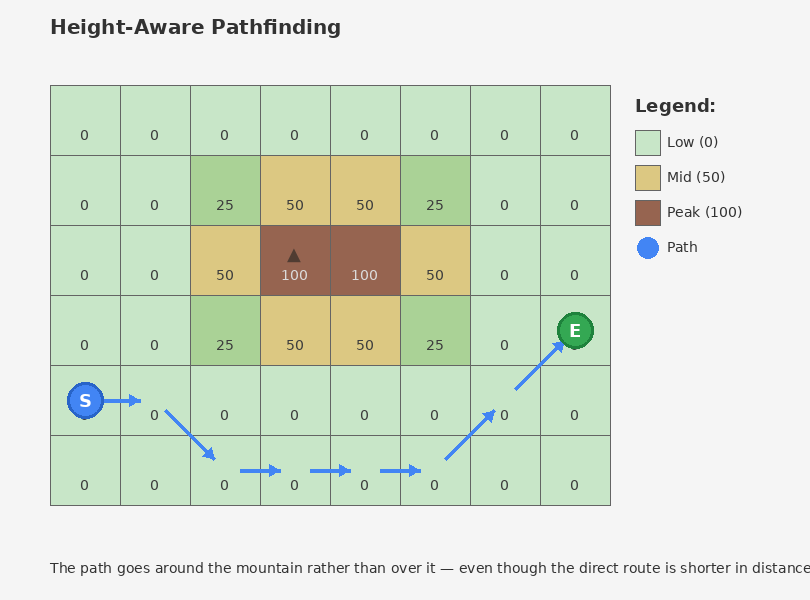
Height-Aware Cost Model
Standard A* only considers distance. AirPath adds height-based costs to create natural flight paths that prefer valleys over mountains.
Cost Formula
Total G Cost = Previous G + Movement Cost + Fly Cost
Where Fly Cost = Altitude Cost + Climb Cost + Slope Penalty
Cost Components
1. Movement Cost (Distance)
Base cost for moving between cells.
Cardinal (N/S/E/W): 1.0 × CellSize
Diagonal: 1.414 × CellSize (√2)
2. Altitude Cost
Penalizes being at high elevations. Makes paths prefer lower terrain.
Altitude Cost = Height × FlyCostMultiplier × 0.01
Effect: A cell at height 100 with multiplier 2.5 adds 100 × 2.5 × 0.01 = 2.5 to the cost.
3. Climb Cost
Extra penalty for gaining altitude. Only applies when moving uphill.
If going uphill (heightDiff > 0):
Climb Cost = HeightDifference × FlyCostMultiplier × 0.5
If going downhill or level:
Climb Cost = 0
Effect: Climbing 10 units with multiplier 2.5 adds 10 × 2.5 × 0.5 = 12.5 to the cost.
4. Slope Penalty
Penalizes rapid height changes in either direction. Smooths paths and avoids cliff edges.
Slope Penalty = |HeightDifference| × FlyCostMultiplier × 0.1
Effect: A 10-unit height change (up or down) with multiplier 2.5 adds 10 × 2.5 × 0.1 = 2.5 to the cost.
Complete Example
Moving from a cell at height 50 to a neighbor at height 65 (cardinal direction):
Movement Cost: 1.0 × 15.625 (cell size) = 15.625
Altitude Cost: 65 × 2.5 × 0.01 = 1.625
Climb Cost: 15 × 2.5 × 0.5 = 18.75
Slope Penalty: 15 × 2.5 × 0.1 = 3.75
───────
Total Cost: 39.75
Compare to moving to a cell at height 50 (same level):
Movement Cost: 1.0 × 15.625 = 15.625
Altitude Cost: 50 × 2.5 × 0.01 = 1.25
Climb Cost: 0 (no climb) = 0
Slope Penalty: 0 (no height change) = 0
───────
Total Cost: 16.875
The algorithm strongly prefers the level path.
Heuristic Function
AirPath uses Octile distance — the optimal heuristic for 8-directional movement:
Octile Distance = max(dx, dy) + 0.414 × min(dx, dy)
Where dx and dy are the grid distances to the target.
This heuristic is:
- Admissible — Never overestimates, guaranteeing optimal paths
- Consistent — Ensures efficient search without revisiting nodes
Diagonal Movement
The algorithm supports 8-directional movement with corner-cutting prevention:
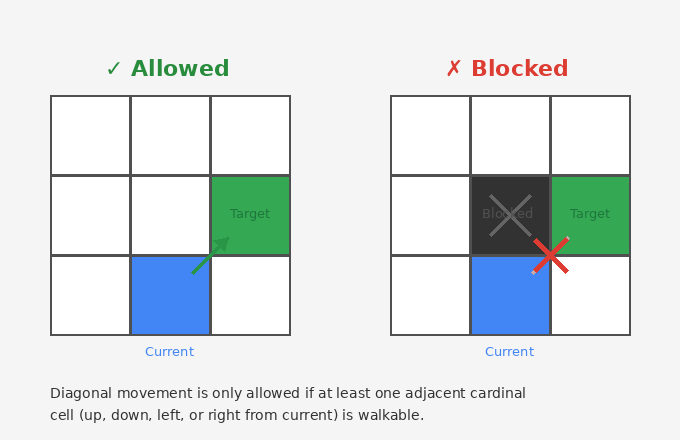
A diagonal move is only allowed if at least one adjacent cardinal cell is walkable.
FlyCostMultiplier
The Fly Cost Multiplier in PathfindingConfiguration scales all height-based costs:
| Value | Effect |
|---|---|
| 0.5 | Weak height avoidance — paths may cross mountains |
| 2.5 | Default — balanced height consideration |
| 5.0 | Strong height avoidance — paths strongly prefer valleys |
| 10.0 | Very strong — almost always takes lowest route |
Tuning tip: Increase if paths cross terrain you'd expect them to avoid. Decrease if paths take unnecessarily long detours.
Performance Optimizations
The A* job is heavily optimized:
Burst Compilation
[BurstCompile(
FloatMode = FloatMode.Fast,
FloatPrecision = FloatPrecision.Standard,
OptimizeFor = OptimizeFor.Performance
)]
- Compiles to native code
- SIMD vectorization where possible
- No garbage collection
Memory Layout
- Flat arrays indexed by
y × width + x - Cache-friendly access patterns
- Pre-allocated NativeArrays (no allocation during pathfinding)
Algorithm Efficiency
- Early exit when destination reached
- Processed nodes never revisited
- Maximum iteration limit prevents infinite loops
Path Result
The algorithm returns grid indices, which PathfindingService converts to world positions:
Grid Path: [0] → [15] → [30] → [45] → [60]
↓
World Path: [(10, 5, 20), (25, 8, 35), (40, 12, 50), ...]
Each world position includes:
- X/Z from grid cell center
- Y from terrain height + height offset
Walkability
All cells are walkable by default. The system checks IsWalkable but currently doesn't provide a way to mark cells as blocked. Future versions may add obstacle support.
Algorithm Visualization
See Also
- Grid System — How the pathfinding grid works
- PathfindingService — API for path calculation
- Performance Tuning — Optimizing pathfinding